WorkNC integrates the WorkNC Robot module for simulating and editing toolpaths in order to control all types of robots.
This new module has been designed to control robot cells with up to 15 axes. The cells can be equipped with part holders or tool holders according to user needs.
WorkNC Robot can deploy the full range of WorkNC toolpaths for machining, hardening, welding and polishing operations.
The WorkNC Robot features have been designed and tested to provide simplicity and reliability to users. It allows detecting collisions between the cell elements, managing rotation and movement limits as well as singularities.
Features at a glance
-
Easy robot toolpath generation
-
Convert any WorkNC toolpath into robot movements
-
Collision detection with environment.
-
Detection of stroke limit.
-
Detection of singularity.
-
Suggests complementary position.
-
Handles any robot kinematics
Easy toolpaths generation:
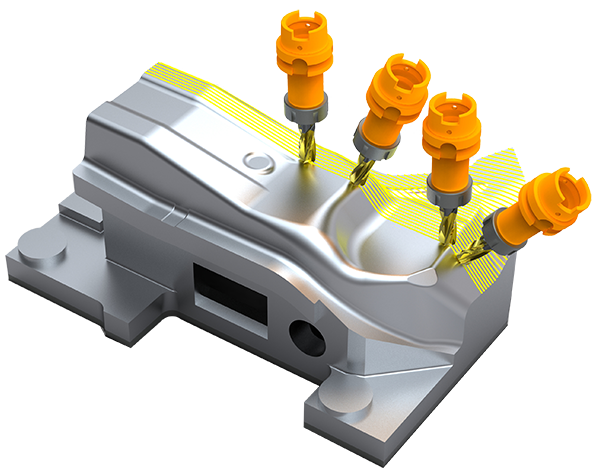
This module allows users to program and convert any of the WorkNC toolpath strategies into robot movements.
It allows robot cells to be programmed for milling purposes but also for torch, laser welding, edge hardening and more.
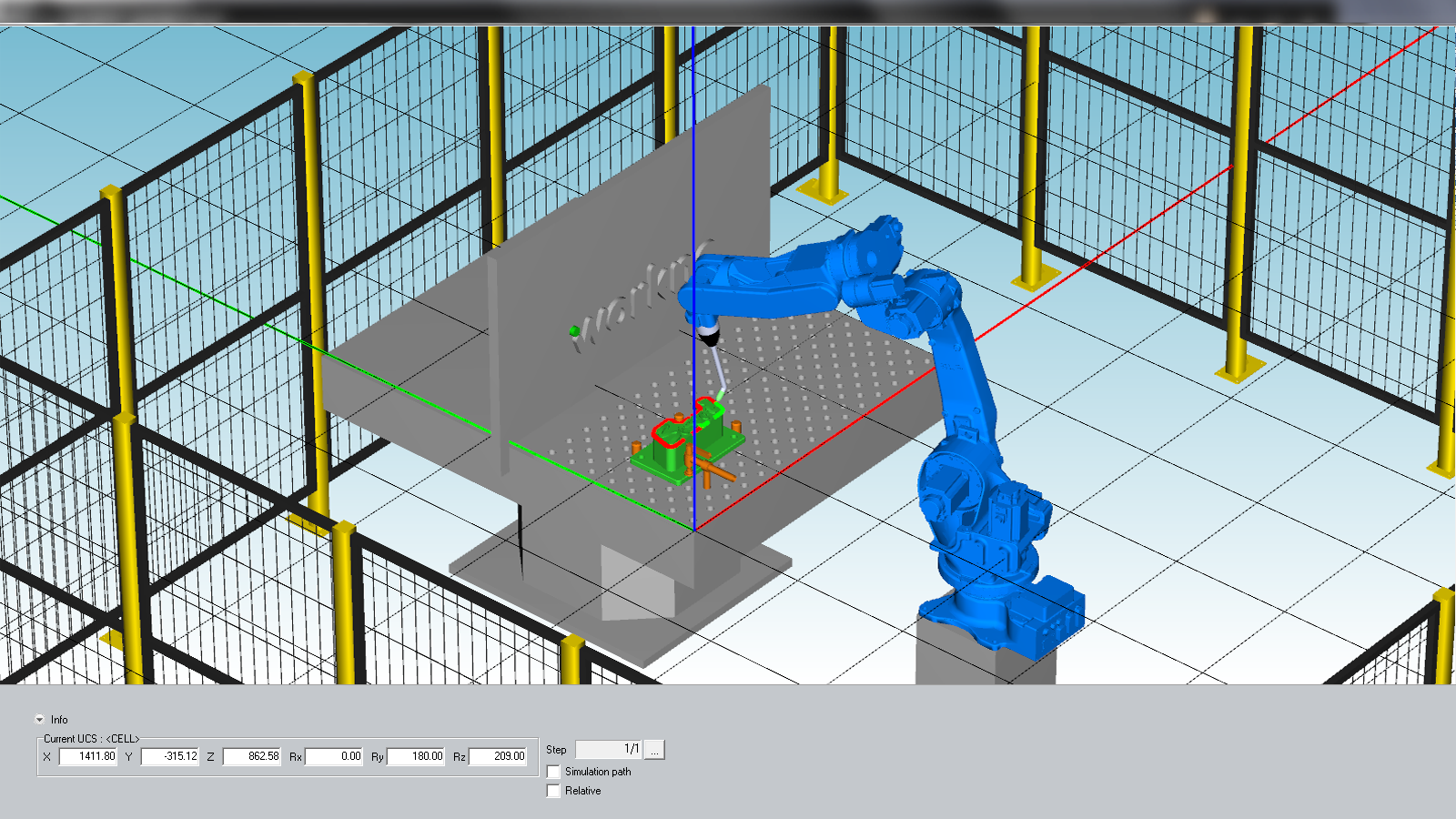
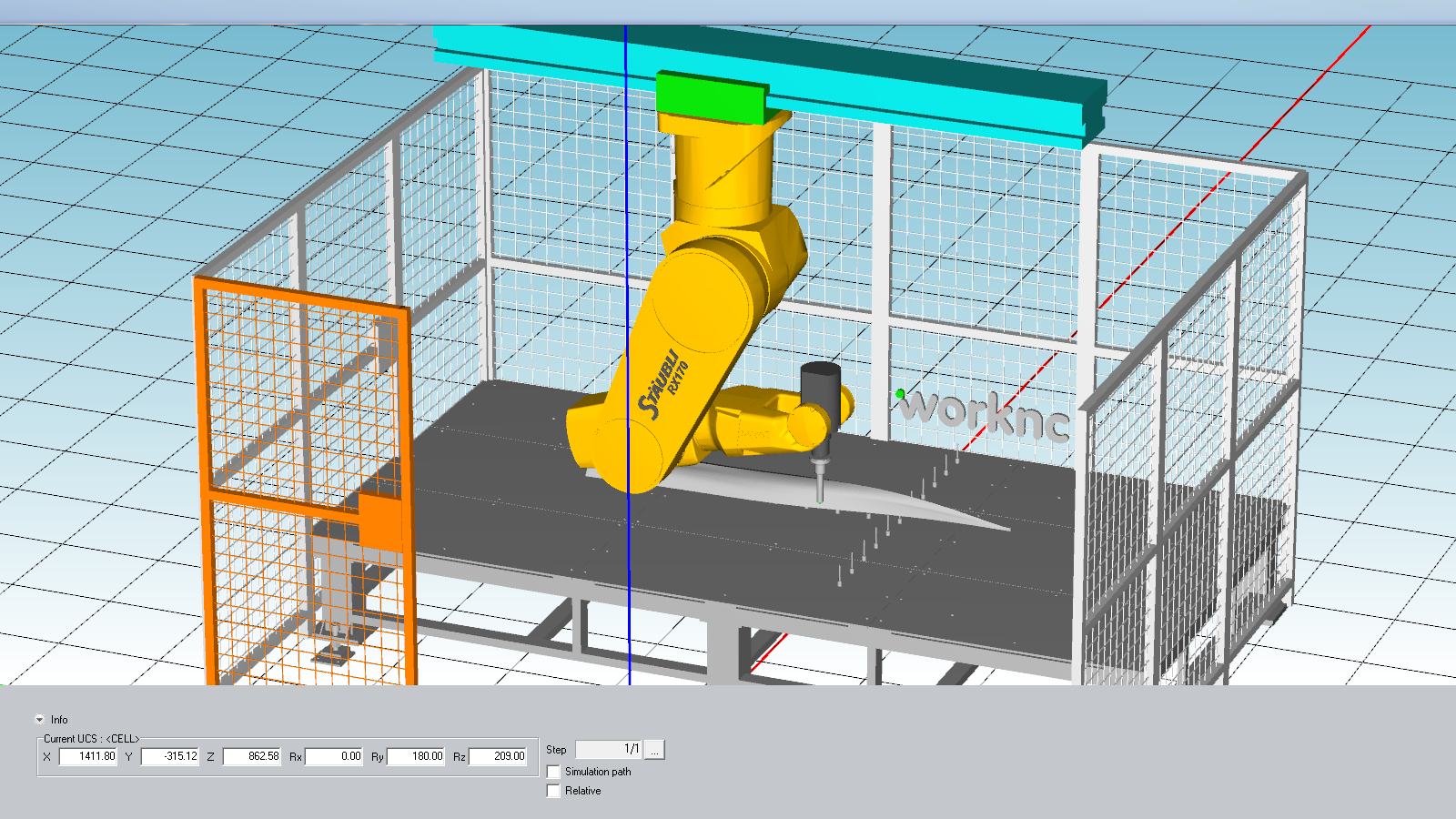
Simulation
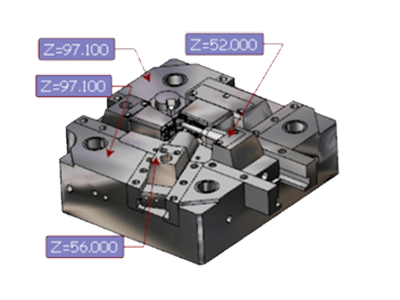
WorkNC Robot has all the necessary tools to virtually create the cell including the tool changer, rotating table, safety barriers, etc. These different elements are taken into account for collision detection. (Alternatively, these elements can be imported from CAD files.)
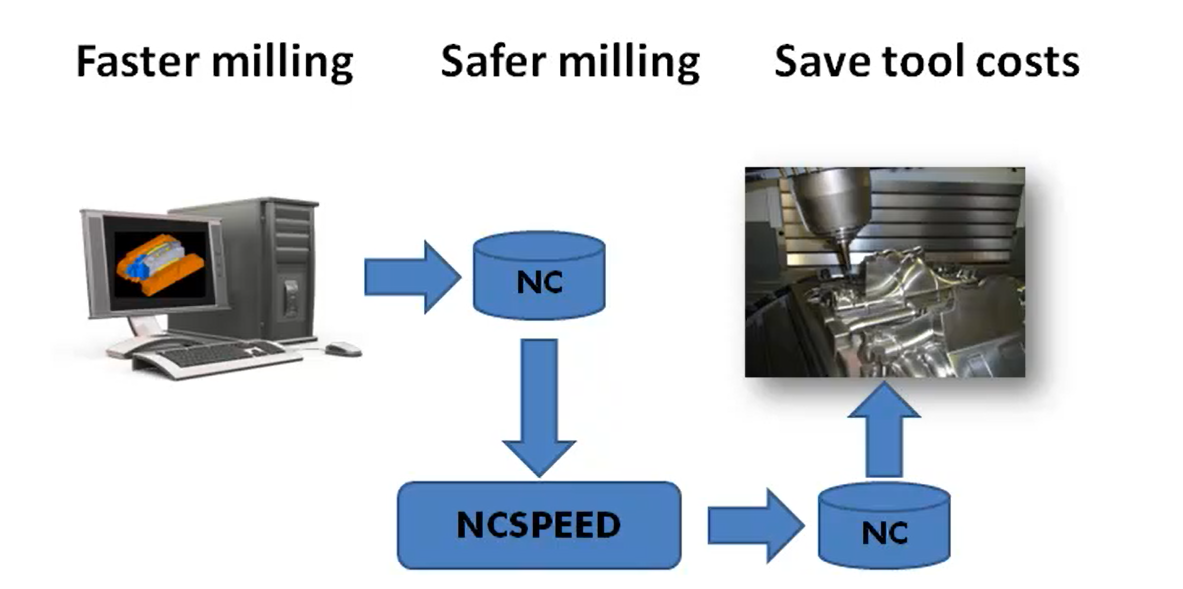
Creating and validating toolpaths in the simulation module saves a considerable amount of time compared to point by point programming on the robot. WorkNC Robot can generate productive toolpaths very quickly.
Toolpath trajectory simulation allows singularity points and out of limit conditions to be visualized. In addition, local toolpath modifications can be made and complementary positions can be found automatically.
Postprocessor
WorkNC Robot generates programs in native robot language eg: VAL3 for Staubli.


 WorkNC Industry ...
WorkNC Industry ...